





















Todos os Produtos
-
Visão nocturna infravermelha multifuncional portátil
-
Robô de eliminação de explosivos
-
Robô de Reconhecimento em Miniatura
-
Visão Digital Noturna Monocular
-
Dispositivo de visão digital noturna
-
Anti-Sniper
-
Radar portátil
-
Lanterna de registro de patrulha
-
Equipamento de Operações Especiais Táticas
-
Espaço do rifle
-
Rangefinder do laser
-
Modelo Militar
-
equipamento tático
-
Caçadores infláveis
X-Y-Z Braço Robótico Coordenado Robô EOD de Tamanho Médio






| Lugar de origem | China |
|---|---|
| Marca | Particle |
| Número do modelo | REOD500 |
| Quantidade de ordem mínima | 1 |
| Preço | $205,761 |
| Termos de pagamento | T/T |

Contacte-me para amostras grátis e vales.
Whatsapp:0086 18588475571
Wechat: 0086 18588475571
Skype: sales10@aixton.com
Se você tem algum interesse, nós fornecemos a ajuda online de 24 horas.
xDetalhes do produto
| Velocidade máxima | ≥ 2 m/s ((5 marchas, variável contínua) | Características especiais | Protecção contra explosões, resistência à água, capacidade de desarmar remotamente |
|---|---|---|---|
| Nome do produto | Objetivos da missão Hound-III Robô EOD para medidas de eliminação e transferência de riscos | Características | 1. Design de braço mecânico de alta resistência, que confere um desempenho de arrebatamento poderoso |
| Peso da plataforma robótica | ≤ 350 kg ((Conter baterias); | Profundidade da plataforma robótica | ≥ 500 mm; |
| Aplicações | Responder a dispositivos explosivos improvisados | Tamanho da plataforma do robô | 1600×850×1300 mm ((Totalmente armazenado); |
| Tamanho do robô | ≤ 950×650×650 mm ((Totalmente armazenado) | Peso do robô | ≤ 50 kg ((Contém dois conjuntos de baterias) |
| A capacidade de superar obstáculos | ≥400MM | Largura da ranhura | ≥400MM |
| Classificação | ≥45° | Subir escadas | ≥45° |
| Profundidade de remoção | ≥200mm | Duração da bateria (temperatura normal) | ≥3h |
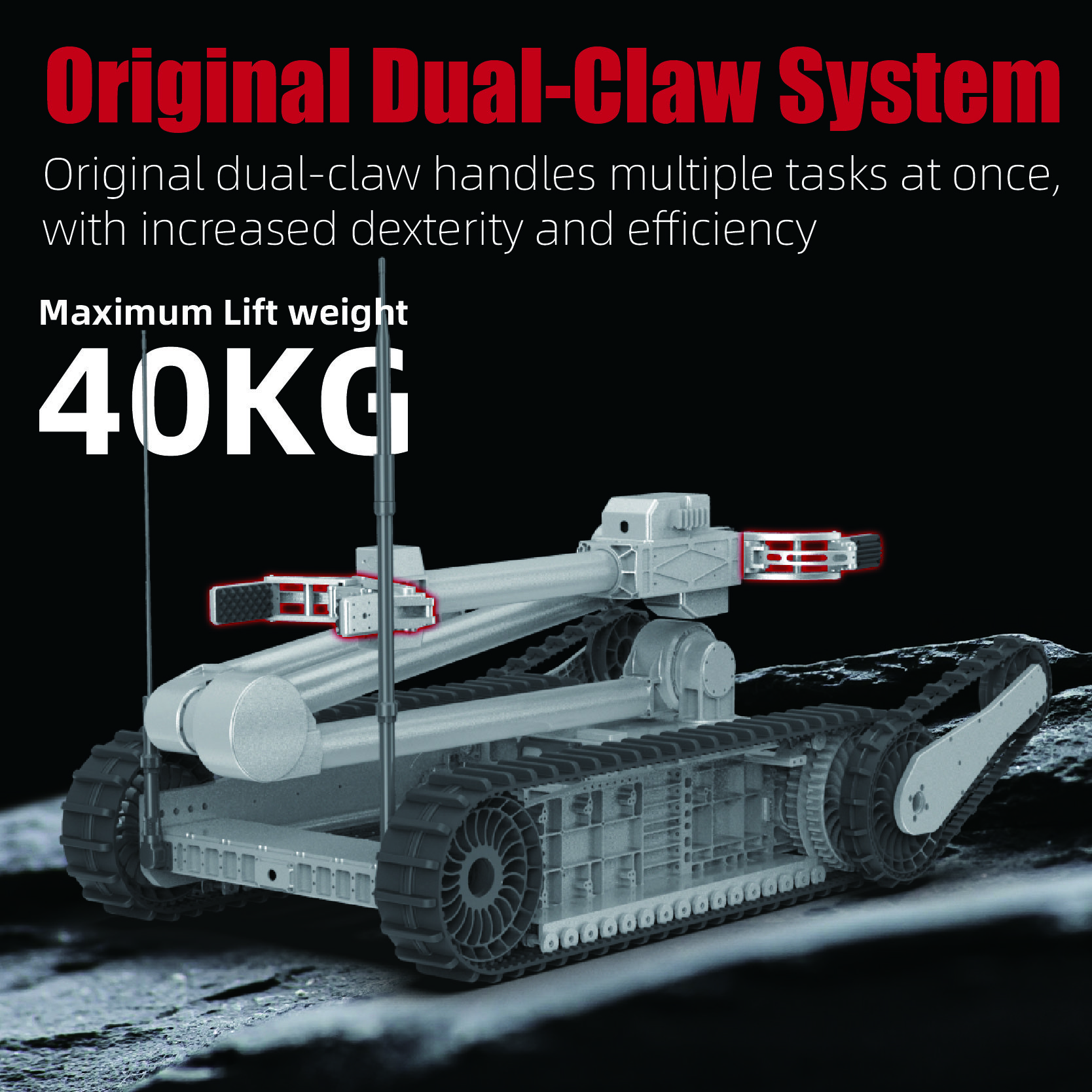
| Comprimento do braço | 2000 mm | Peso máximo do saque | ≥ 40 kg |
| Garras | 2 | Articulações móveis | 8 |
| Tamanho do controlador | ≤ 270 mm × 170 mm × 100 mm | Peso do controlador | ≤ 1,2 kg ((Sem mochila) |
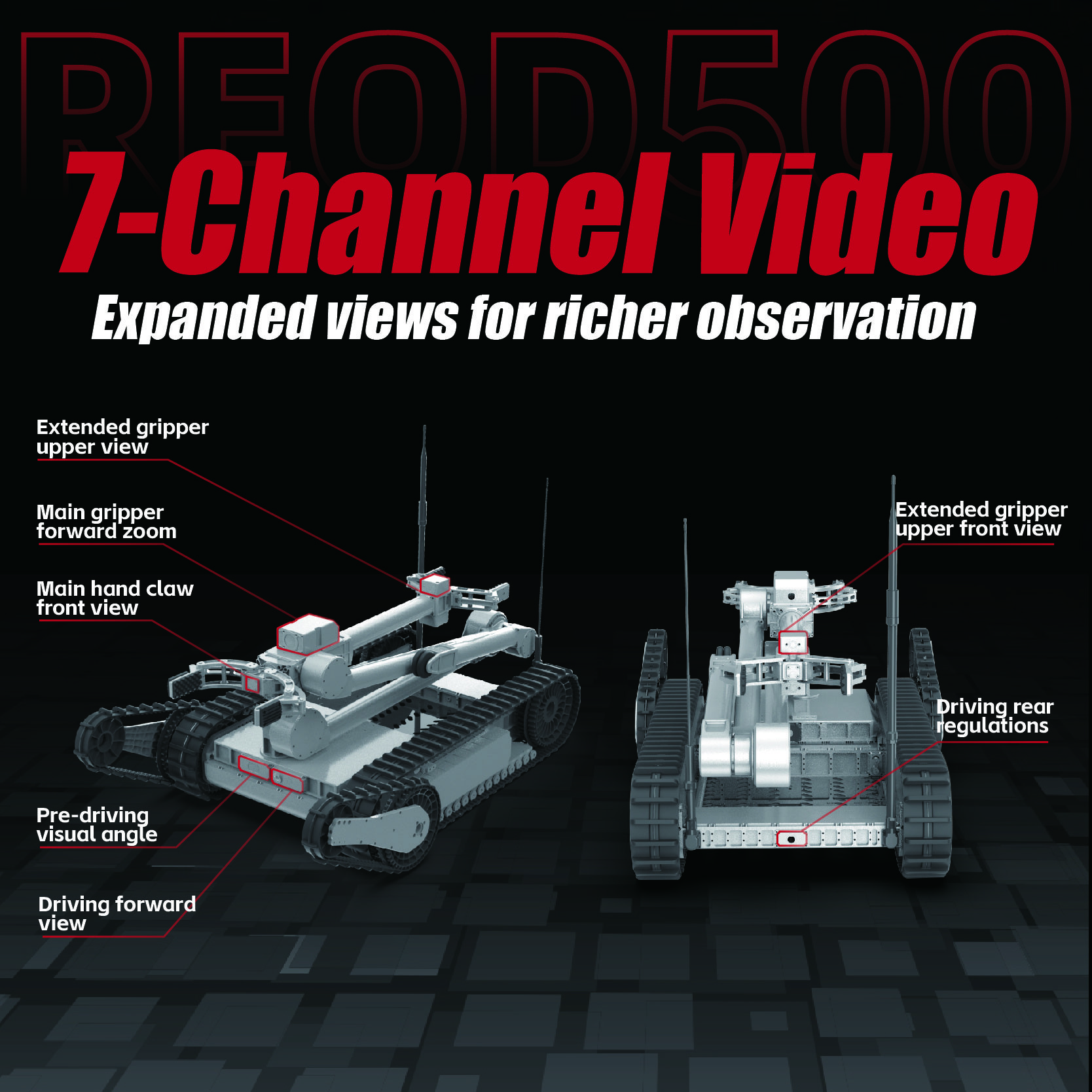
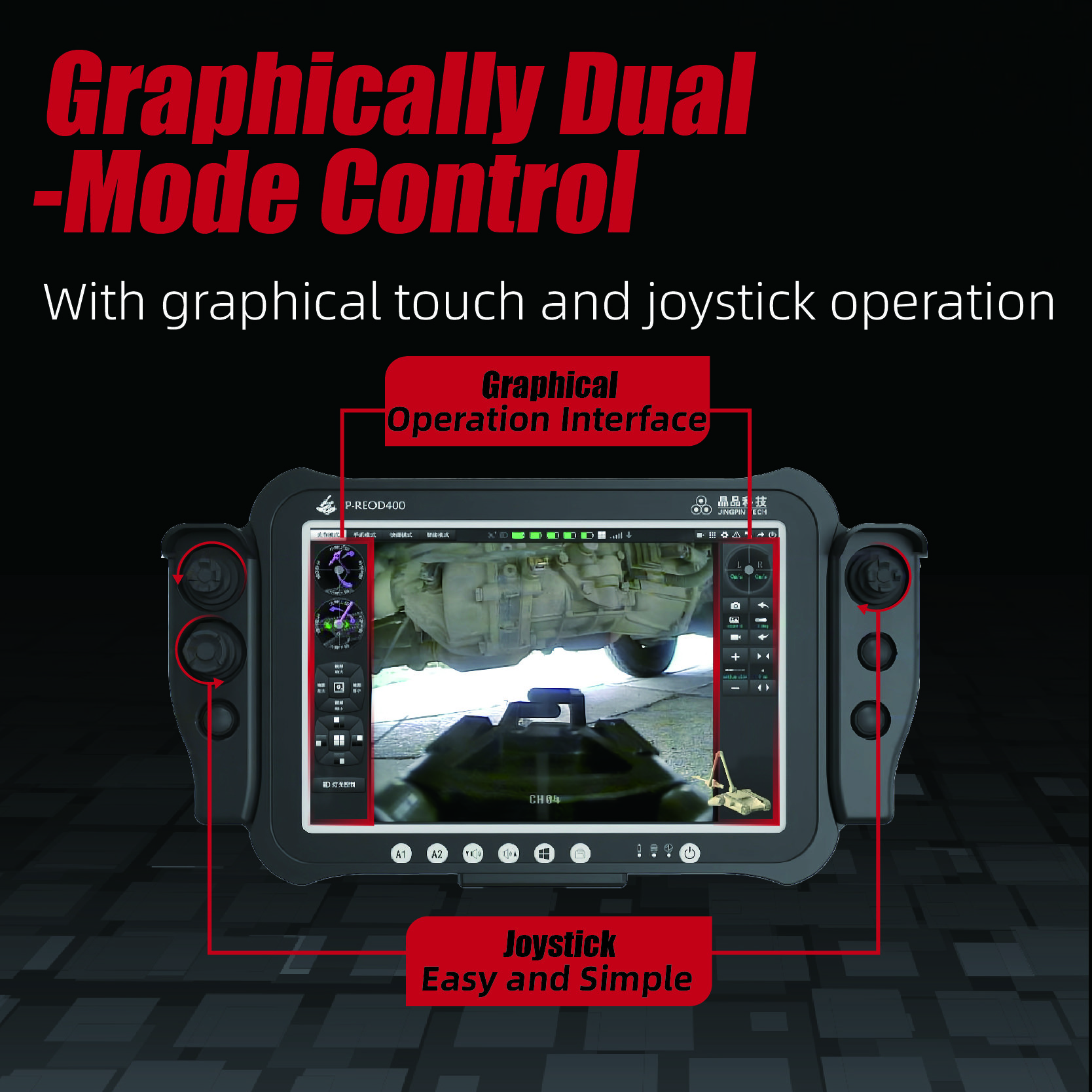
| Ecrã de exibição do controlador | LCD de 7' | Exibição de vídeo | 7 canais, um dos quais tem a função de zoom de foco automático. |
| Método de operação | Operação em duplo modo do botão roqueiro e tela sensível ao toque | Método de controlo | Controle por cabo ≥ 100 m ((Cable padrão),Controlo sem fios ≥ 1000 m ((Exterior) |
| Nível IP da plataforma robótica | IP66 | Grau IP do braço | IP66 |
| Temperatura de funcionamento | -40°C+50°C | Temperatura de armazenamento | -45°C+60°C |
| Destacar | Robô de eliminação de munições explosivas com braço robótico coordenado,Robô de eliminação de munições explosivas médias,IP66 robôs eod |
||
Descrição de produto
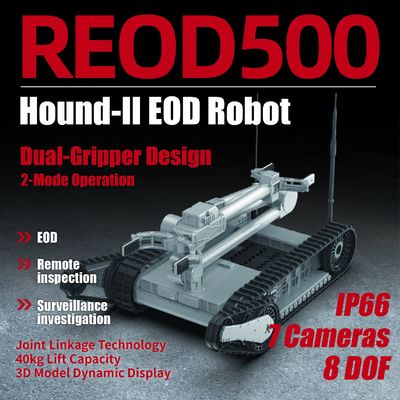
Fabricantes de robôs EOD de tamanho médio com braço robótico coordenado X-Y-Z avançado
Descrição e características
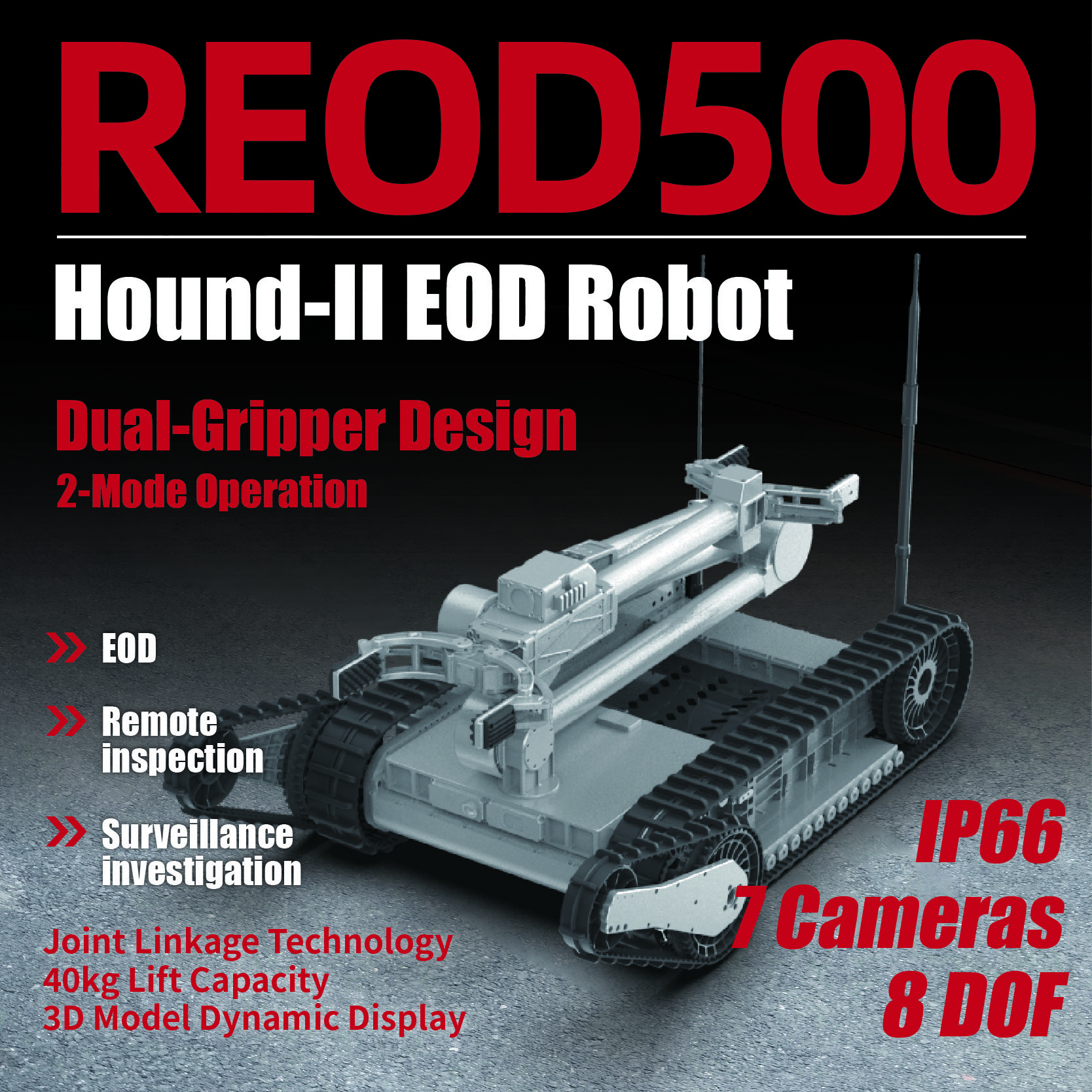
O robô JP REOD500 EOD é uma solução avançada para a eliminação de munições explosivas (EOD) em ambientes de alto risco.Com um sistema de rastreador de braço de balanço que combina o rastreador principal com um mecanismo de obstáculo de braço de balanço, este projeto melhora significativamente as capacidades de navegação de obstáculos do robô, garantindo um desempenho robusto e confiável nas operações de EOD.O robô está equipado com um braço robótico de vários graus de liberdade que fornece poderosas capacidades de agarre e manuseio. O JP REOD500 tem dimensões de ≤ 900 mm × 650 mm × 500 mm (totalmente estocado) e um peso de ≤ 42 kg. Tem uma velocidade máxima de ≥ 2,0 m/s, uma distância de obstáculos de ≥ 320 mm,e uma capacidade de desnivel e de subida de escadas de até 45°, garantindo uma manobrabilidade superior em vários terrenos.
Equipado com um Manipulador de 8 graus de liberdade, o JP REOD500 oferece um controle preciso com uma altura máxima de agarre de ≥ 1800 mm (garra principal) e uma distância de agarre mais distante de ≥ 1400 mm (garra principal).O robô suporta uma exibição de vídeo de 7 canais, permitindo perspectivas de observação mais ricas, e possui capacidades de exibição remota de postura 3D em tempo real.uma classificação IP67 para resistência à poeira e à água, e métodos de controle que incluem controle de cabo até 120m e controle sem fio até 1200m, o JP REOD500 é construído para confiabilidade e versatilidade em condições desafiadoras.Oferece opções de personalização OEM e ODM para atender às necessidades operacionais específicas.
Projetos de braço mecânico melhorados Performance de agarre muito melhorada
O JP REOD500 possui um design de braço mecânico aprimorado que melhora significativamente suas capacidades de agarre.Este design avançado permite que o robô manuse uma variedade de objetos perigosos com maior precisão e força, aumentando a eficiência global das operações de EOD.
Desenho de patente inovador de "duas garras"
O projeto patenteado de "duas garras" permite que o JP REOD500 resolva várias tarefas simultaneamente.como agarrar objetos ao abrir portas ou realizar outras tarefas auxiliares, tornando-o altamente eficaz para missões de EOD.
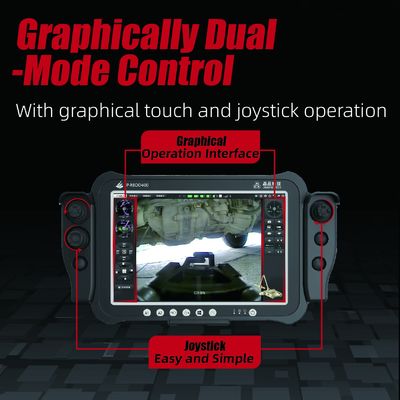
Operação em modo duplo gráfico Experiência de operação conveniente e fiável
A operação gráfica de modo duplo fornece aos utilizadores uma interface intuitiva para controlar o robô.assegurar a facilidade de utilização e a fiabilidade em ambientes de alto stressEsta concepção elimina a necessidade de os utilizadores memorizar funções complexas de botões, reduzindo o tempo de formação e melhorando a eficiência operacional.
Exibição remota em tempo real 3D Operação fina diante dos seus olhos
O JP REOD500 utiliza tecnologia avançada de exibição virtual 3D para feedback em tempo real do estado do robô.fornecendo uma compreensão intuitiva e detalhada do posicionamento e ambiente do robô, mesmo quando opera fora da linha de visão.
Projeto de controlo pré-definido inteligente
O design inteligente de controlo "preset" permite que o JP REOD500 alcance automaticamente as posições pré-definidas com um clique, com base nas necessidades do utilizador.Reduzir a quantidade de intervenção manual necessária e garantir uma execução rápida e fiável das tarefas.
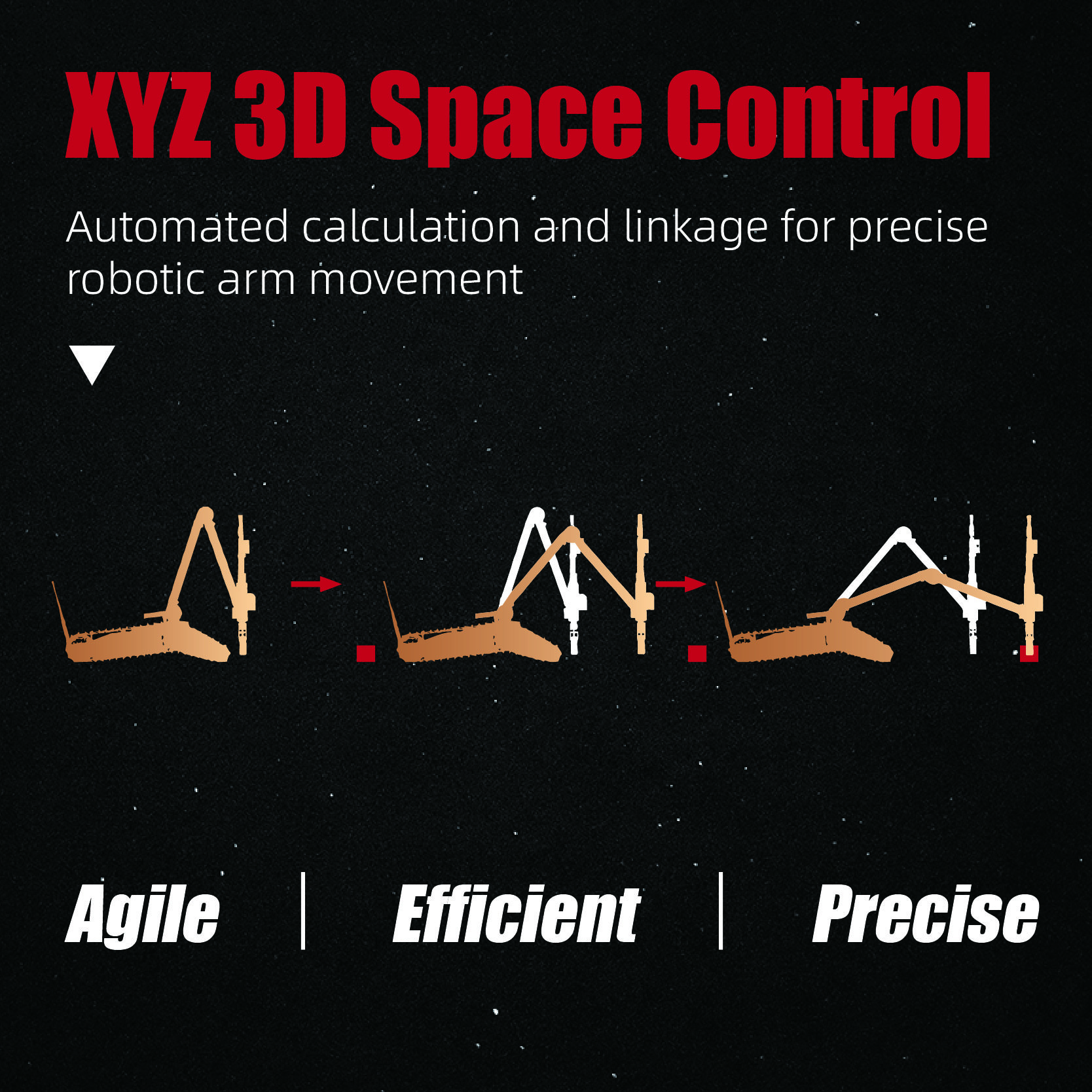
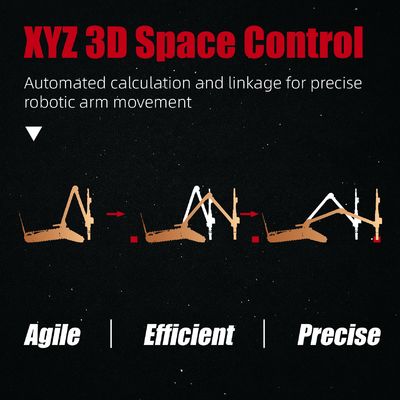
"X-Y-Z" Design de ligação de braço robótico em espaço tridimensional
O JP REOD500 emprega um design tridimensional de ligação de braço robótico "X-Y-Z" baseado em cálculo automático, fornecendo controle preciso sobre os movimentos do robô.Este projeto melhora a eficiência e precisão das tarefas de eliminação de bombas, reduzindo o tempo médio de funcionamento em até 80% em comparação com o controlo tradicional de uma única articulação.
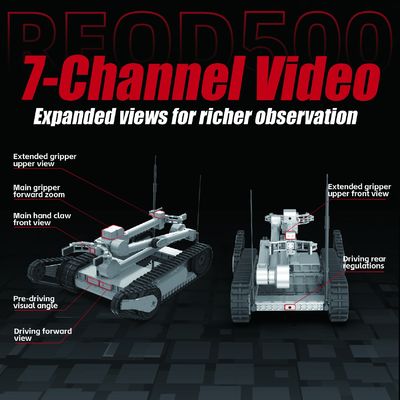
Sistema de vídeo de 7 canais Perspectivas de observação mais ricas
Equipado com um sistema de vídeo de 7 canais, o JP REOD500 fornece múltiplos ângulos de observação para melhorar a consciência situacional.Modo de pinça primária, e modo de pinça auxiliar, adaptando-se ao contexto operacional para uma visão óptima.
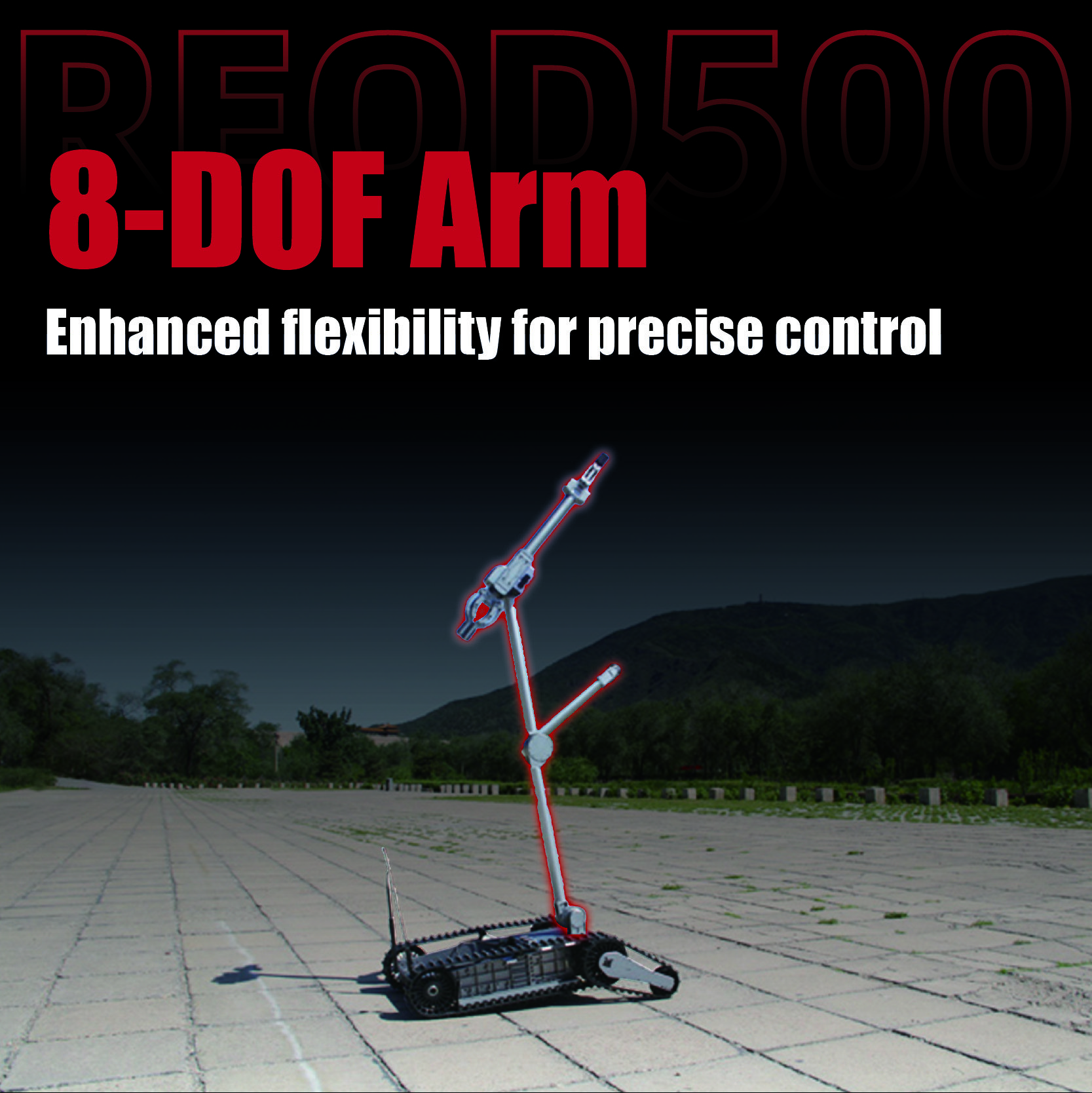
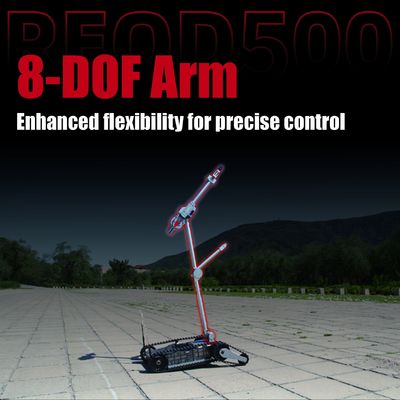
Desenho de braço robótico de 8 graus de liberdade
O design do braço robótico de 8 graus de liberdade dá ao JP REOD500 fortes capacidades de alcance espacial, permitindo que ele execute tarefas em ambientes altos, baixos, profundos ou de mesa.Esta flexibilidade torna-o adequado para uma ampla gama de operações de EOD que exigem precisão e adaptabilidade.
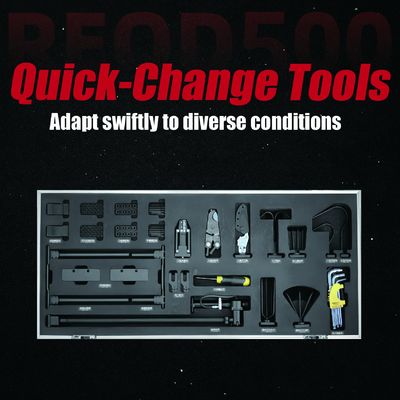
Sistema versátil de ferramentas de mudança rápida adapta-se a várias condições de trabalho
O JP REOD500 está equipado com um sistema de ferramentas de mudança rápida versátil, incluindo vários conjuntos de ferramentas de agarre, conjuntos de ferramentas básicas e conjuntos de ferramentas estendidas.Estas ferramentas podem ser substituídas rapidamente com base nos requisitos operacionais específicos, permitindo ao robô adaptar-se perfeitamente a várias condições de trabalho e enfrentar eficazmente diferentes tipos de perigos.
Aplicações
Galeria de imagens
Parâmetros técnicos
| Plataforma robótica | |
|
Tamanho |
≤ 950×650×650 mm ((Totalmente armazenado) |
|
Peso |
≤ 50 kg ((Contém dois conjuntos de baterias) |
|
Velocidade máxima |
≥ 2 m/s ((5 marchas, variável contínua) |
|
Sobre a habilidade de enfrentar obstáculos |
≥ 400 mm |
|
Largura da ranhura |
≥ 400 mm |
|
Classificação |
≥ 45° |
|
Subir escadas |
≥ 45° |
|
Profundidade de remoção |
≥ 200 mm |
|
Duração da bateria (temperatura normal) |
≥ 3h |
|
Desempenho de agarrar braço robótico |
|
|
Comprimento do braço |
2000 mm |
|
Peso máximo do saque |
≥ 40 kg |
|
Garras |
2 |
|
Articulações móveis |
8 |
|
Controlador portátil |
|
|
Tamanho |
≤ 270 mm × 170 mm × 100 mm |
|
Peso |
≤ 1,2 kg ((Sem mochila) |
|
Ecrã de exibição |
LCD de 7' |
|
Exibição de vídeo |
7 canais, um dos quais tem a função de zoom de foco automático. |
|
Método de operação |
Funcionamento em dois modos do balançador de botões e do ecrã táctil |
|
Método de controlo |
Controle por cabo ≥ 100 m ((Cable padrão),Controlo sem fios ≥ 1000 m ((Exterior) |
|
Nível de protecção e adaptabilidade ao ambiente |
|
|
Plataforma robótica |
IP66 |
|
Braço |
IP66 |
|
Temperatura de funcionamento |
-40°C+50°C |
|
Temperatura de armazenamento |
-45°C+60°C |
Contacte-nos
Miss Amy.
E-mail:Amy-huang@mysmech.com
Produtos recomendados