





















Todos os Produtos
-
Visão nocturna infravermelha multifuncional portátil
-
Robô de eliminação de explosivos
-
Robô de Reconhecimento em Miniatura
-
Visão Digital Noturna Monocular
-
Dispositivo de visão digital noturna
-
Anti-Sniper
-
Radar portátil
-
Lanterna de registro de patrulha
-
Equipamento de Operações Especiais Táticas
-
Espaço do rifle
-
Rangefinder do laser
-
Modelo Militar
-
equipamento tático
-
Caçadores infláveis
Disposição de munições explosivas leves Robôs EOD Hound-I






| Lugar de origem | China |
|---|---|
| Marca | Particle |
| Número do modelo | REOD400 |
| Preço | $102,881 |
| Termos de pagamento | T/T |

Contacte-me para amostras grátis e vales.
Whatsapp:0086 18588475571
Wechat: 0086 18588475571
Skype: sales10@aixton.com
Se você tem algum interesse, nós fornecemos a ajuda online de 24 horas.
xDetalhes do produto
| tamanho | ≤ 830 mm × 600 mm × 460 mm ((Totalmente armazenado) | Peso | ≤ 37 kg ((Contém dois conjuntos de baterias) |
|---|---|---|---|
| A capacidade de superar obstáculos | ≥300mm | Largura da ranhura | ≥400MM |
| Classificação | ≥45° | Subir escadas | ≥45° |
| Articulações móveis | 8 | Distância máxima de captura | ≥ 1650 mm |
| Largura máxima de abertura da pinça | ≥160mm | Capacidade do elevador | 6 a 16 kg |
| Método de operação | Operação em duplo modo do botão roqueiro e tela sensível ao toque | Método de controlo | Controle por cabo ≥ 100 m ((Cable padrão),Controlo sem fios ≥ 1000 m ((Exterior) |
| Duração da bateria (temperatura normal) | ≥2H | Grau IP | IP66 |
| Destacar | Robôs de caça,Robôs de eliminação de munições explosivas,Eodo robótico leve |
||
Descrição de produto
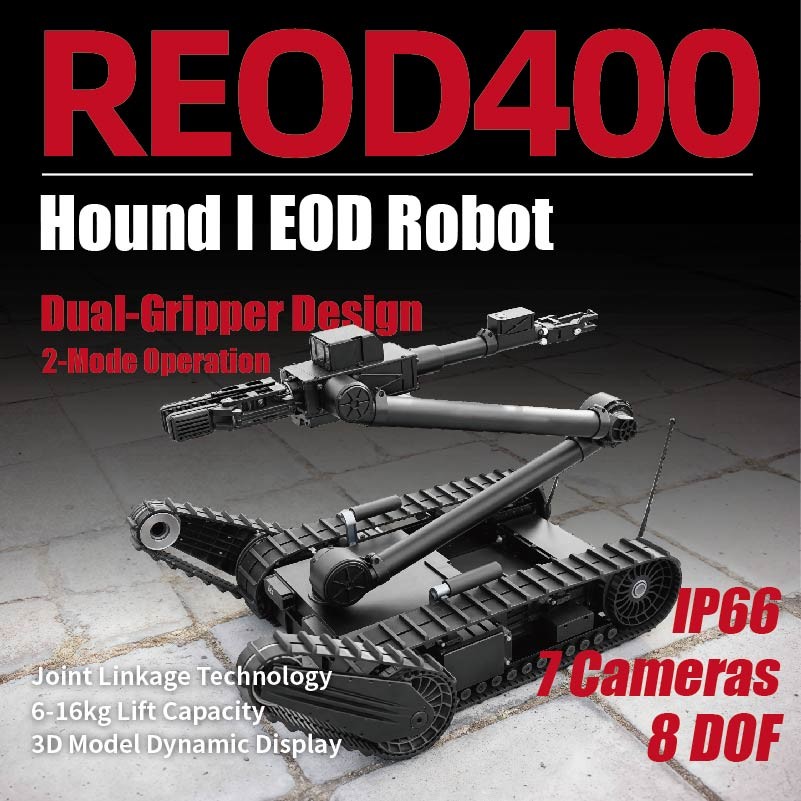
Robô de eliminação de munições explosivas leves Hound-I
Descrição e características
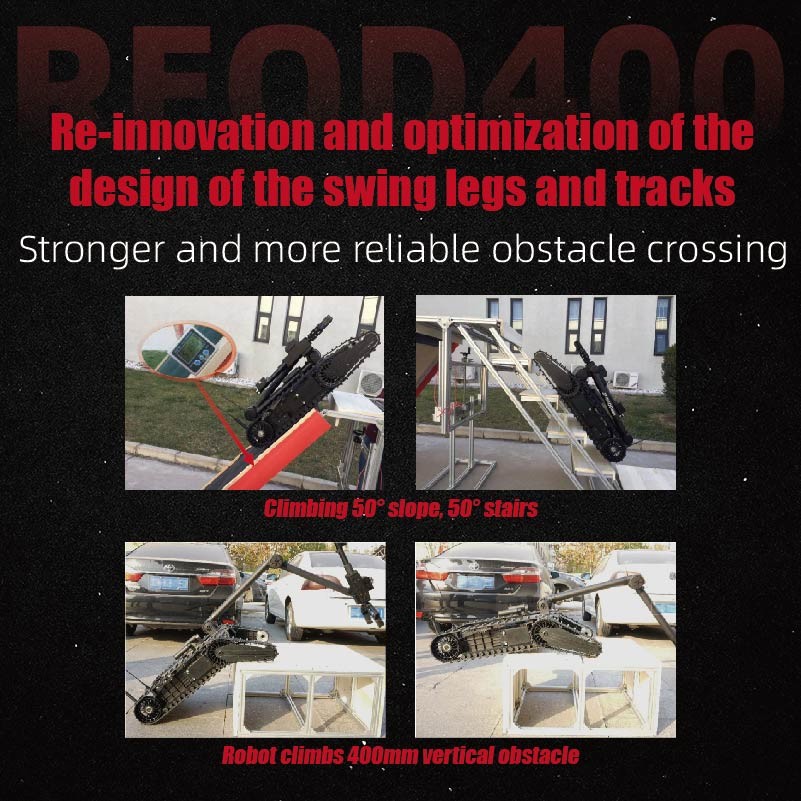
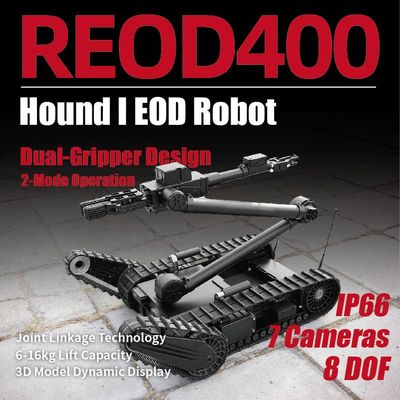
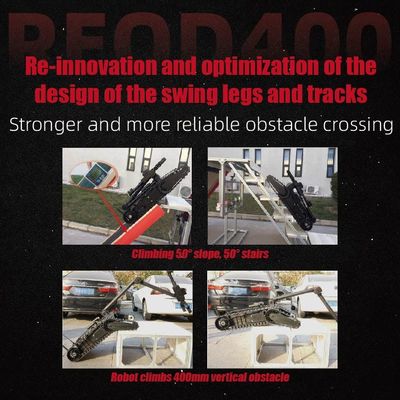
O robô REOD400 EOD é uma solução avançada para a eliminação de munições explosivas (EOD) em ambientes de alto risco.tornando-o altamente eficiente para operações como o antiterrorismo urbanoO robô é compacto e leve, com dimensões de ≤ 830 mm × 600 mm × 460 mm (completamente estocado) e um peso de ≤ 37 kg.Tem uma velocidade máxima ≥ 10,8 m/s com 5 marchas e uma tração variável contínua, uma distância livre de obstáculos ≥ 300 mm e uma capacidade de descida e de subida de escadas de até 45°,garantir uma manobrabilidade e adaptabilidade superiores em vários terrenos.
Equipado com 8 graus de liberdadeManipulador, o REOD400 oferece um controlo preciso com uma altura de agarre máxima de ≥ 1700 mm (garra principal) e uma distância de agarre máxima de ≥ 1380 mm (garra principal).permitir perspectivas de observação mais ricasCom uma duração da bateria de ≥ 2 horas à temperatura normal, uma classificação IP66 para resistência à poeira e à água,e métodos de controlo que incluem controlo por cabo até 100 m e controlo sem fios até 1000 mAlém disso, oferece opções de personalização OEM e ODM para atender às necessidades operacionais específicas.
Projetos inovadores de "dual-gripper" ¢ Melhorar a flexibilidade e a viabilidade na execução de tarefas
O inovador projeto "Dual Gripper" apresenta um braço robótico equipado com uma "garra de agarre primária" e uma "garra de extensão multifuncional".Este projeto aumenta muito a flexibilidade e a viabilidade do robô na execução de tarefas, proporcionando um apoio eficaz para a realização de diversas tarefas numa única operação.O projeto "Dual Gripper" efetivamente aborda as limitações dos robôs de eliminação de bombas tradicionais que têm apenas um "gripper único"," que não podem realizar simultaneamente tarefas como "agarrar objetos perigosos" e "abrir portas, cortar, prender, cortar, agarrar e outras ações auxiliares".Pode realizar tarefas como "abrir uma porta e agarrar um objeto de uma só vez". "
O projeto "Dual Gripper" liberta com sucesso a "garra de agarre primária" de ter que executar outras funções além de agarre, melhorando significativamente as capacidades de agarre do robô.A garra primária pode agarrar objetos perigosos suspeitos que pesam entre 6 e 16 kg., com uma largura de aderência de até 160 mm e uma força de fixação máxima de 300 N. Além disso, em função das tarefas operacionais específicas,O "conjunto de ferramentas de agarrador" pode ser rapidamente substituído para lidar com diferentes tipos e formas de itens perigosos..
Suporte ao controle de toque / joystick Interação mais amigável e operação confiável
O design gráfico de operação de controle de toque / joystick é atualmente uma solução líder de controle de robôs de eliminação de bombas internacionalmente.Foi altamente reconhecido pelos utilizadores pela sua interação mais fácil de usar e operação confiávelAs suas principais características são as seguintes:
- Desenho gráfico da operação:Todas as operações são desenhadas de forma gráfica, eliminando a necessidade de os utilizadores memorizarem funções de botão complexas e protocolos operacionais.Esta interface fácil de usar torna a operação simples e intuitiva, reduzindo significativamente o tempo de formação.
- Desenho de operação de controlo com toque / joystick:Os botões do joystick e uma tela sensível ao toque podem ser usados para executar todas as operações do robô.A redundância proporcionada por estes dois métodos de funcionamento não só aumenta a fiabilidade do sistema, mas também melhora a eficiência operacional através da combinação de botões de joystick com controles touchscreen.
|
|
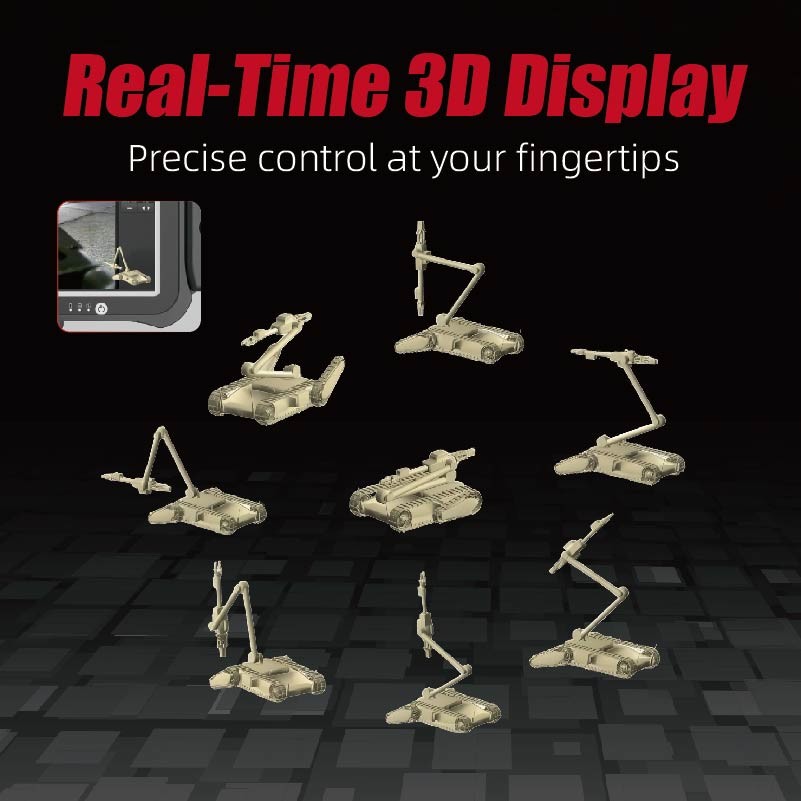
Exibição remota 3D em tempo real, mais intuitiva
Visto que os robôs desarmadores operam muitas vezes fora da linha de visão durante as missões, informações em tempo real sobre os ângulos e posições espaciais das articulações do robô são cruciais para os operadores. The REOD400 uses high-speed links and advanced computer technology to not only achieve real-time feedback of the robot's status information but also to employ leading 3D virtual display technology for remote real-time display of the robot's 3D statusIsto faz com que o robô se sinta "próximo" mesmo quando está "longe", permitindo uma operação mais intuitiva.
As principais características do ecrã 3D remoto em tempo real são as seguintes:
- Exibição em tempo real do estado 3D do robô
- Observação do estado 3D do robô de vários ângulos
- Zoom para dentro e para fora do estado 3D do robô
O controlador portátil do robô reproduz o estado 3D remoto do robô, permitindo que o modelo 3D seja ampliado, ampliado e observado de qualquer ângulo.
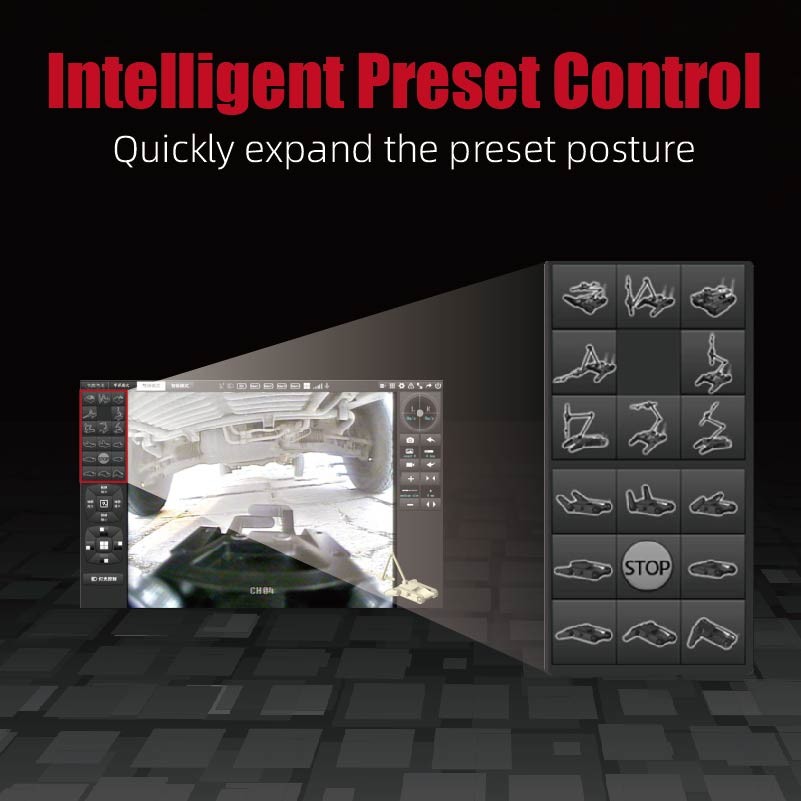
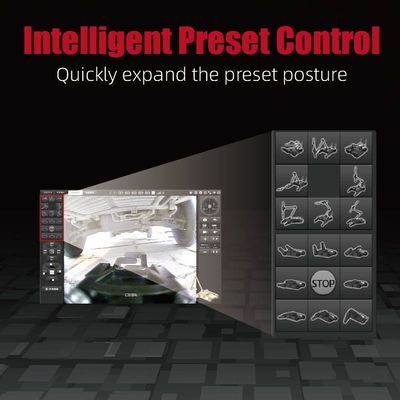
Projeto inteligente de controlo de postura pré-definido Operação mais simples e rápida
Com o "Intelligent Preset Posture Control for Common Tasks", o robô pode "alcançar automaticamente uma posição pré-definida com um clique" com base nas necessidades do usuário.Esta característica reduz consideravelmente a quantidade de operação manual necessária no local, servindo como um assistente eficaz para os operadores da linha de frente e aumentando a fiabilidade e a segurança das tarefas de eliminação de bombas.
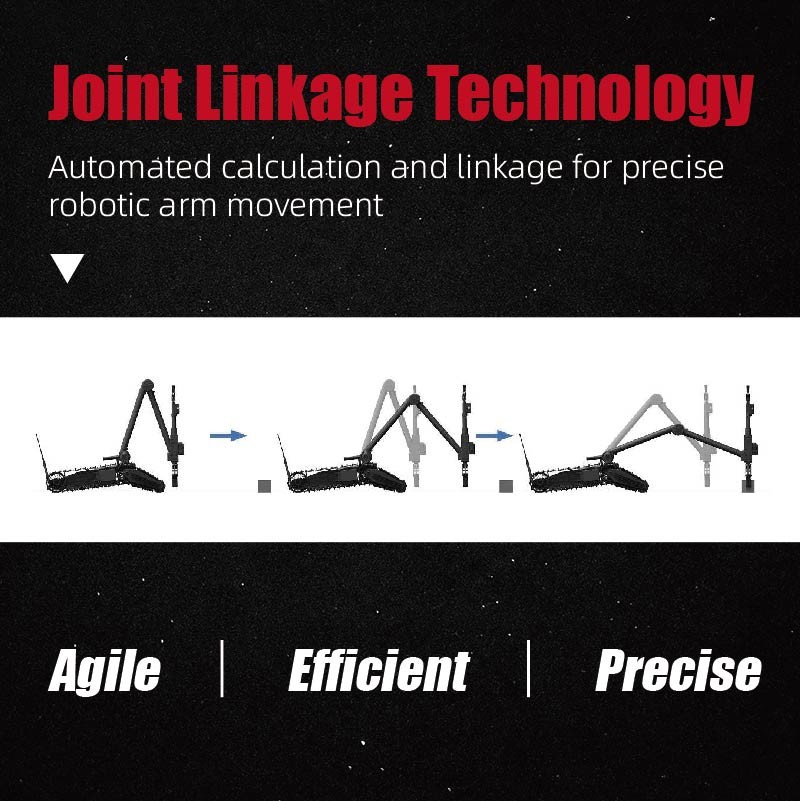
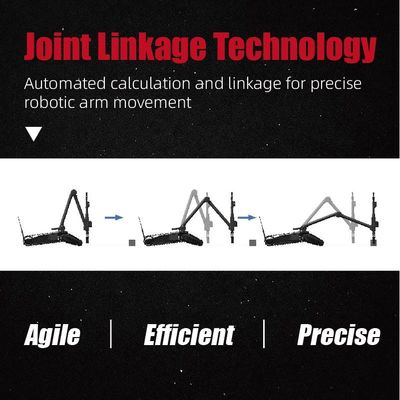
Tecnologia de ligação conjunta "X-Y-Z"
O projeto de operação da tecnologia de ligação conjunta X-Y-Z baseado no cálculo automático, também conhecido como "projeto de controlo de tradução da pinça baseado em coordenadas cartesianas","transforma o controlo tradicional de "uma única articulação" dos robôs de eliminação de bombas em "controlo coordenado de múltiplas articulações"O sistema de controlo de uma única articulação reduz o tempo médio de funcionamento em 80%.
O REOD400 consegue "controle de translação da pinça baseado em coordenadas cartesianas" através de cálculo automático.Ele rapidamente controla o robô para alcançar "multi-articulação movimento coordenado" para a tradução de um espaço dimensionado pinçaIsto reduz muito a dificuldade operacional e aumenta a precisão, permitindo um posicionamento quase imediato sem a necessidade de iterações repetidas.
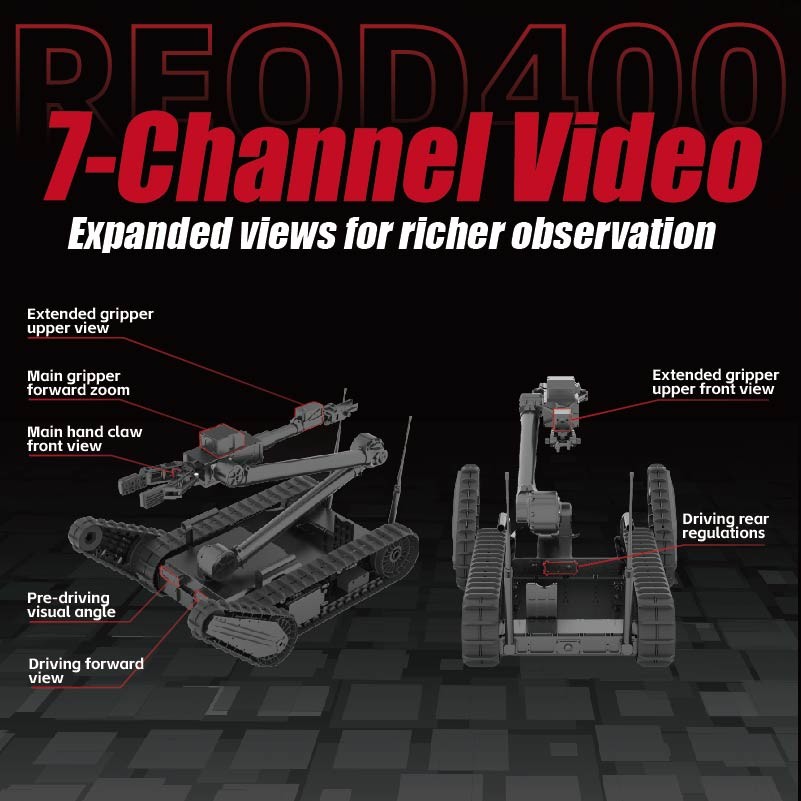
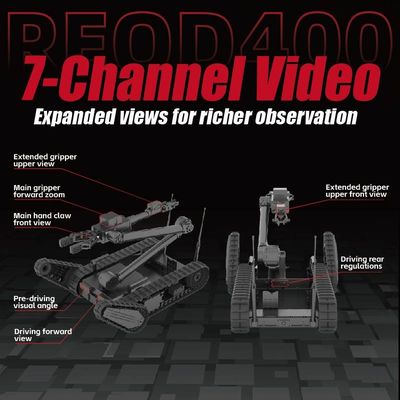
Sistema de Imagem Adaptativo ao Modo ∙ Sete Visualizações da Câmera para uma observação melhorada
O sistema de imagem do robô funciona como os olhos do operador.Melhorar significativamente a capacidade dos operadores de linha de frente de perceber ambientes remotosO projeto do sistema de 7 câmaras não é um arranjo simples, mas sim uma melhoria e otimização com base em problemas encontrados pelos utilizadores durante a utilização real.
O sistema de imagem é geralmente dividido em três combinações de imagem: modo de condução, modo de gripper primário e modo de gripper estendido.Ele muda automaticamente entre estes modos com base em tarefas típicas, tais como condução, agarrar e observar, oferecendo uma maior consciência ambiental remota e uma gama mais rica de ângulos de observação.
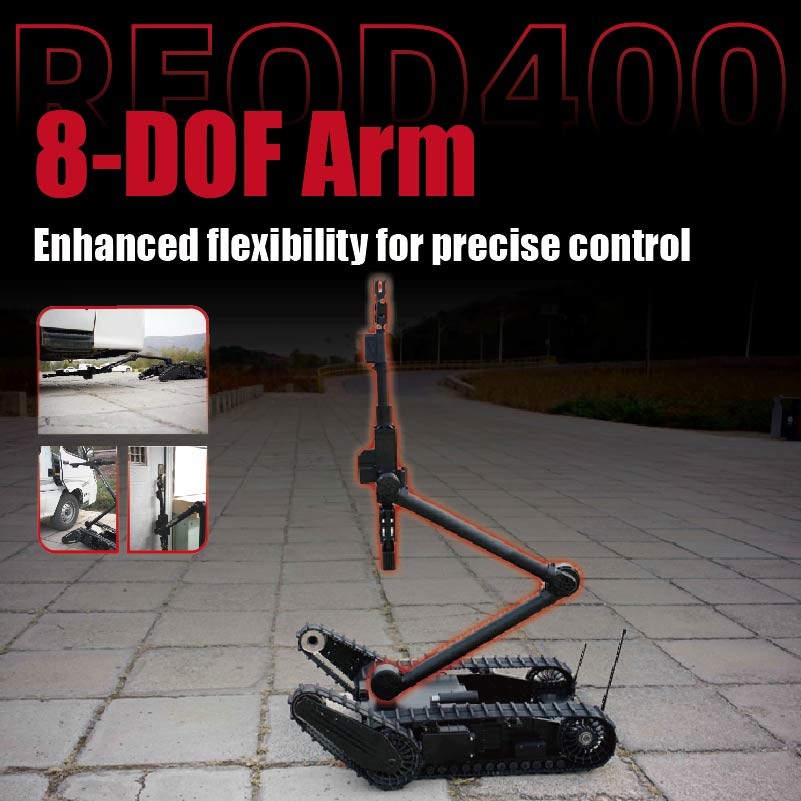
Projeto de braço robótico integrado com oito graus de liberdade
O braço robótico REOD400 apresenta um design integrado de 8 graus de liberdade, fornecendo fortes capacidades de alcance espacial.Este design permite que o braço robótico execute não só tarefas convencionais de eliminação de bombas, mas também operações que os robôs convencionais de eliminação de bombas de 5 ou 6 graus de liberdade não podem lidar, como agarrar objetos em ambientes altos, baixos e profundos, ou em ambientes de mesa, bem como conduzir reconhecimento multi-ângulo em ambientes altos, baixos e profundos.
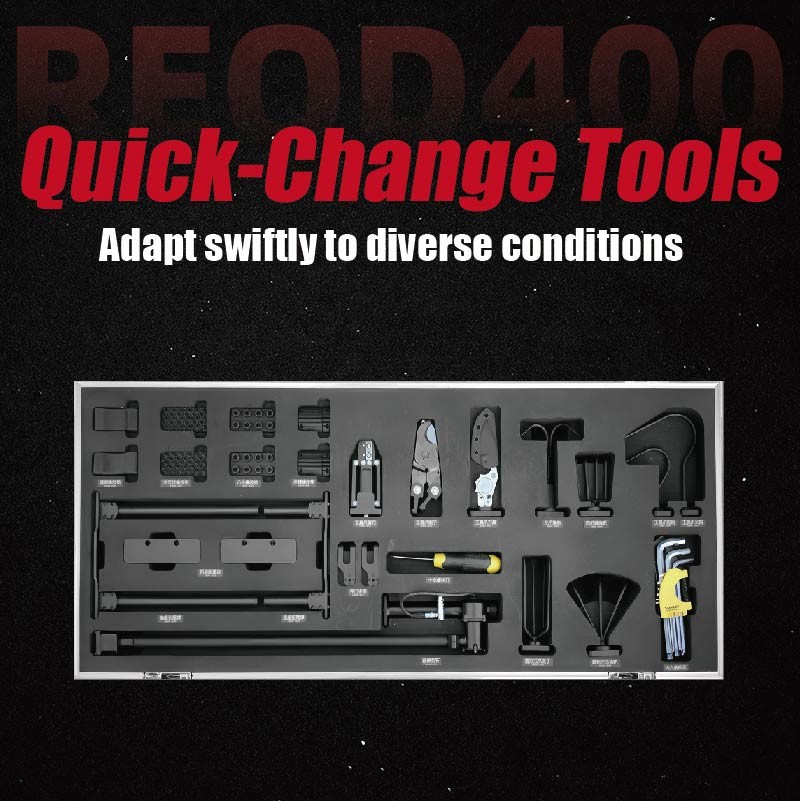
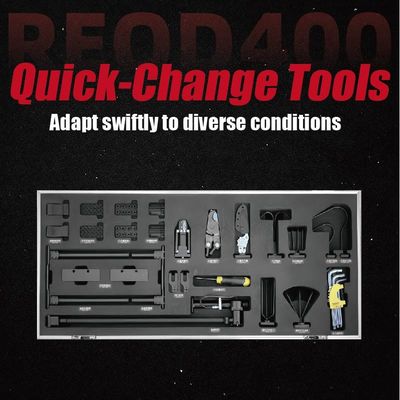
Sistema versátil de ferramentas de mudança rápida
O robô REOD400 está equipado com 18 tipos de "ferramentas de mudança rápida", incluindo 6 conjuntos de ferramentas de agarre, 6 conjuntos de ferramentas básicas e 6 conjuntos de ferramentas estendidas,Permitindo a substituição rápida dos "conjuntos de ferramentas de agarre" com base em diferentes tarefas operacionais e nos tipos e formas dos vários objetos perigosos, satisfazendo assim as diversas necessidades operacionais dos utilizadores.
Aplicações
Galeria de imagens
Parâmetros técnicos
|
Plataforma robótica |
|
|
Tamanho |
≤ 830 × 600 × 460 mm ((Totalmente armazenado) |
|
Peso |
≤ 37 kg (Contém dois conjuntos de baterias) |
|
Velocidade máxima |
≥ 1,8 m/s ((5 marchas, variável contínua) |
|
Sobre a habilidade de enfrentar obstáculos |
≥300 mm |
|
Largura da ranhura |
≥ 400 mm |
|
Classificação |
≥ 45° |
|
Subir escadas |
≥ 45° |
|
Duração da bateria (temperatura normal) |
≥ 2h |
|
Grau IP |
IP66 |
|
Desempenho de agarrar braço robótico |
|
|
Estado alargado |
≥ 6 kg |
|
Estado retirado |
≥ 16 kg |
|
Garras |
2 |
|
Articulações móveis |
8 |
|
Altura máxima de observação |
≥2400 mm |
|
Altura máxima de aperto |
≥1700 mm(Pedaço principal),≥2000 mm(Vice-claver) |
|
Distância máxima de captura |
≥1380 mm(Pedaço principal),≥ 1650 mm(Vice-claver) |
|
Largura máxima de abertura da pinça |
≥160 mm |
|
Controlador portátil |
|
|
Tamanho |
≤360 × 210 × 70 mm |
|
Peso |
≤ 2 kg ((Sem mochila) |
|
Ecrã de exibição |
10.1'' LCD |
|
Exibição de vídeo |
7 canais |
|
Método de operação |
Funcionamento em dois modos do balançador de botões e do ecrã táctil |
|
Método de controlo |
Controle por cabo ≥ 100 m ((Cable padrão),Controlo sem fios ≥ 1000 m ((Exterior) |
Contacte-nos
Miss Amy.
E-mail:Amy-huang@mysmech.com
Produtos recomendados